Adaptive Cruise Control (ACC) Enhancement Framework
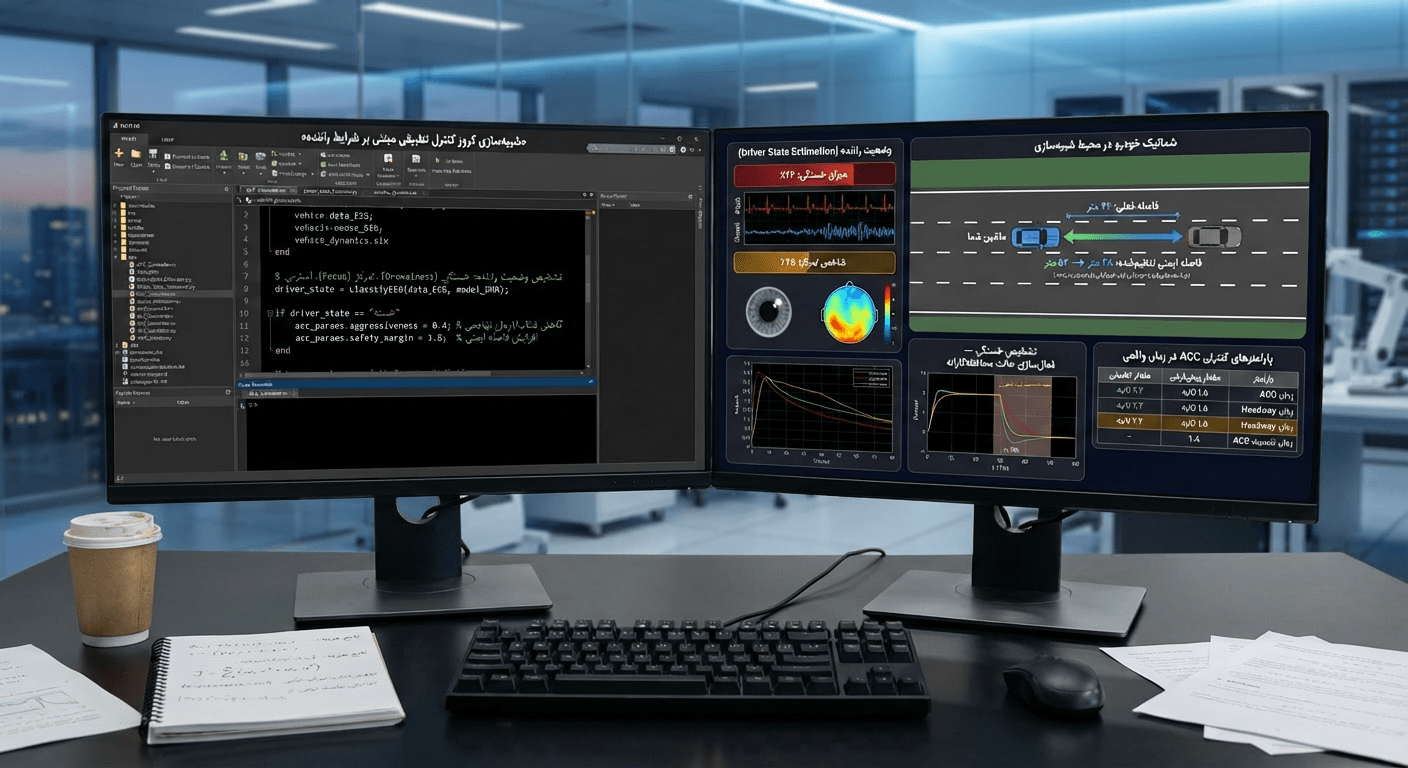
Note: The image is for demonstration purposes only. It does not represent the actual software interface, and the software name is not accurate.
Project Overview
An intelligent, data-driven framework designed to augment adaptive cruise control (ACC) systems in autonomous vehicles. This Python-based solution introduces a novel decision-support layer that analyzes real-time sensor and environmental outputs to recommend dynamic ACC parameter adjustments—improving responsiveness, safety margins, and ride comfort. While the proprietary core logic remains confidential per client NDA, the system demonstrated measurable improvements in predictive control accuracy and driver-assist harmony during validation on diverse highway and urban datasets.
Key Features
- Real-time interpretation of vehicle dynamics and environmental telemetry
- Context-aware recommendations for ACC behavior tuning (e.g., following distance, acceleration profile)
- Modular architecture enabling seamless integration with existing ADAS stacks
- Data-informed decision engine supporting both human-in-the-loop and fully autonomous modes
Technology Stack
- Core Language: Python (NumPy, Pandas for signal/data processing)
- Modeling & Simulation: Custom dynamics simulator (integrated with synthetic sensor streams)
- Visualization & Analysis: Matplotlib, Seaborn (for performance profiling and validation)
- Deployment-Ready Design:Lightweight, dependency-minimized structure suitable for embedded prototyping)